On-device physical AI guide
온디바이스·엣지 AI 로봇 가이드
로봇이 클라우드에만 의존하지 않고 현장에서 판단하려면 모델, 칩, 센서, 배터리, 지연시간을 함께 봐야 합니다. 이 허브는 엣지 AI와 피지컬 AI 인프라를 연결합니다.
엣지 AI 핵심 글
온디바이스 모델, 로봇용 컴퓨팅, 오픈소스 학습 도구, 로봇 개발 플랫폼을 함께 읽으면 제품화 병목이 더 선명해집니다.
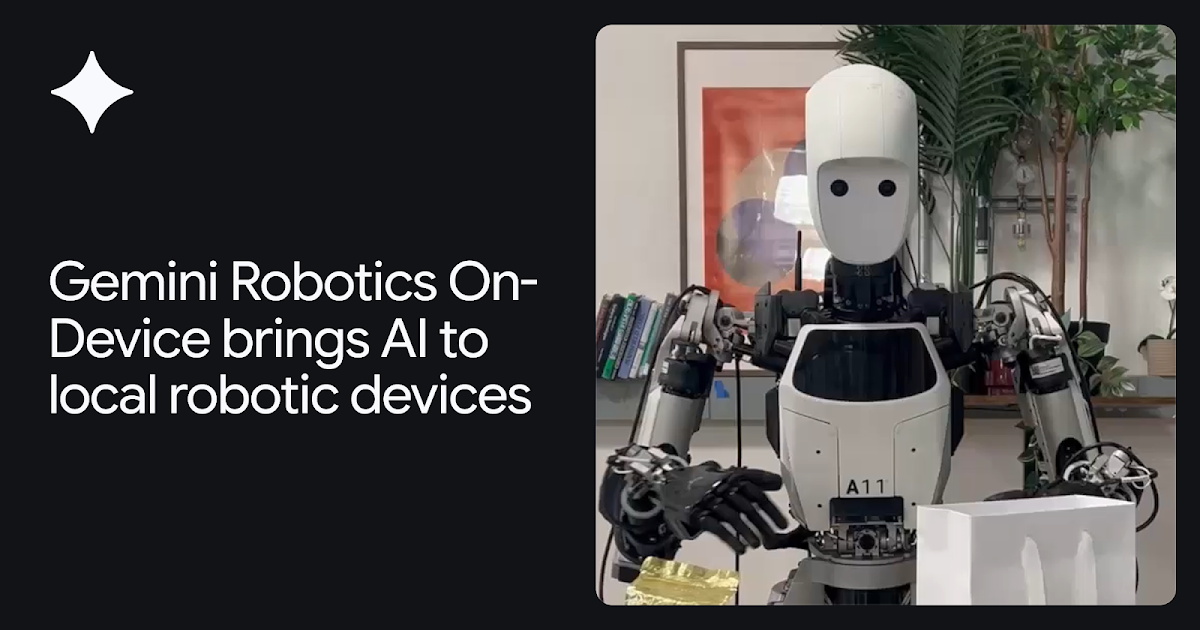 Gemini Robotics On-Device 해설: 로봇 AI가 클라우드 밖에서 돌아가야 하는 이유Gemini Robotics On-Device가 로컬 추론을 강조하는 이유입니다.
Gemini Robotics On-Device 해설: 로봇 AI가 클라우드 밖에서 돌아가야 하는 이유Gemini Robotics On-Device가 로컬 추론을 강조하는 이유입니다. Jetson Thor 분석: 휴머노이드 로봇의 온보드 컴퓨팅 기준이 바뀌는 지점Jetson Thor의 FP4 성능, 메모리, 센서 처리 스펙을 봅니다.
Jetson Thor 분석: 휴머노이드 로봇의 온보드 컴퓨팅 기준이 바뀌는 지점Jetson Thor의 FP4 성능, 메모리, 센서 처리 스펙을 봅니다. Gemma 모델이 중요한 이유: 오픈 모델과 온디바이스 AI의 현실Gemma와 온디바이스 AI의 현실적인 의미를 봅니다.
Gemma 모델이 중요한 이유: 오픈 모델과 온디바이스 AI의 현실Gemma와 온디바이스 AI의 현실적인 의미를 봅니다. ROS 2 Kilted Kaiju 정리: 로봇 개발자가 2026년에 봐야 할 기반 변화ROS 2 Kilted Kaiju로 로봇 개발 기반을 점검합니다.
ROS 2 Kilted Kaiju 정리: 로봇 개발자가 2026년에 봐야 할 기반 변화ROS 2 Kilted Kaiju로 로봇 개발 기반을 점검합니다. LeRobot v0.5.0 분석: 오픈소스 로봇 학습 생태계가 커지는 방식LeRobot으로 데이터와 학습 워크플로를 봅니다.
LeRobot v0.5.0 분석: 오픈소스 로봇 학습 생태계가 커지는 방식LeRobot으로 데이터와 학습 워크플로를 봅니다. Nemotron 3 Nano Omni 분석: 멀티모달 에이전트 모델의 다음 단계Nemotron 3 Nano Omni로 멀티모달 에이전트 흐름을 함께 봅니다.
Nemotron 3 Nano Omni 분석: 멀티모달 에이전트 모델의 다음 단계Nemotron 3 Nano Omni로 멀티모달 에이전트 흐름을 함께 봅니다.엣지 AI 판단 기준
| 기준 | 봐야 할 스펙 | 왜 중요한가 |
|---|---|---|
| 지연시간 | 로컬 추론, 센서 처리, 네트워크 왕복 | 사람 근처에서 움직이는 로봇은 지연이 곧 안전 문제입니다. |
| 전력·발열 | 40~130W 같은 운영 범위, 배터리 지속시간 | 모델 성능이 높아도 몸체가 감당하지 못하면 제품화가 어렵습니다. |
| 센서 병목 | 카메라, 라이다, joint state, audio stream | 로봇은 모델 추론보다 입력 스트림 처리가 먼저 막힐 수 있습니다. |
| 개발 플랫폼 | ROS 2, LeRobot, SDK, simulation | 현장 배포와 유지보수는 모델보다 툴체인에서 갈립니다. |