AI INSIGHT BRIEF · 확인 기준일 2026.05.20
NVIDIA Isaac GR00T 쉽게 이해하기: 로봇 파운데이션 모델이 중요한 이유
로봇 파운데이션 모델은 로봇에게 “하나의 동작만 외우게 하는 방식”에서 벗어나 언어, 이미지, 행동 데이터를 묶어 여러 작업으로 일반화하려는 시도입니다. NVIDIA Isaac GR00T를 기준으로 쉽게 정리했습니다.
먼저 결론
- Isaac GR00T는 휴머노이드 로봇을 위한 파운데이션 모델과 데이터 파이프라인을 개발하는 NVIDIA의 연구·개발 플랫폼입니다.
- 핵심은 언어와 이미지 같은 멀티모달 입력을 실제 조작 행동으로 연결하는 것입니다.
- 로봇 AI의 병목인 데이터 부족을 시뮬레이션, 합성 데이터, 실제 데이터 조합으로 줄이려는 흐름이 중요합니다.
로봇 파운데이션 모델이란 무엇인가
챗봇에서 파운데이션 모델은 여러 작업에 활용될 수 있는 큰 기반 모델을 뜻합니다. 로봇에서도 비슷한 흐름이 생기고 있습니다. 특정 공장에서 특정 팔 동작만 수행하는 모델이 아니라, 언어 지시와 시각 정보를 바탕으로 물건을 집고 옮기고 정리하는 식의 일반화된 행동을 배우려는 시도입니다.
NVIDIA Isaac GR00T는 이런 흐름을 휴머노이드 로봇 개발 쪽으로 밀어붙이는 플랫폼입니다. NVIDIA 공식 자료는 GR00T를 범용 로봇 파운데이션 모델과 데이터 파이프라인 개발을 위한 연구 이니셔티브이자 개발 플랫폼으로 설명합니다. GR00T N 계열 모델은 언어와 이미지 같은 멀티모달 입력을 받아 다양한 환경에서 조작 작업을 수행하는 방향을 제시합니다.
왜 어려운가: 로봇은 글보다 물리 세계가 까다롭습니다
언어 모델은 틀린 답을 고치면 되지만, 로봇은 틀린 행동이 충돌, 파손, 안전 문제로 이어질 수 있습니다. 그래서 로봇 모델은 텍스트 생성보다 훨씬 더 많은 검증이 필요합니다. 카메라가 보는 장면, 손끝의 접촉, 관절 토크, 균형, 장애물, 배터리 상태가 모두 결과에 영향을 줍니다.
또한 로봇 데이터는 웹 텍스트처럼 쉽게 모으기 어렵습니다. 사람이 직접 시연하고, 센서를 기록하고, 실패 사례까지 모으려면 비용이 큽니다. 이 때문에 NVIDIA는 Omniverse, Cosmos, Isaac GR00T-Mimic, GR00T-Dreams 같은 시뮬레이션과 합성 데이터 흐름을 함께 강조합니다. 실제 데이터만으로는 확장 속도가 느리기 때문입니다.
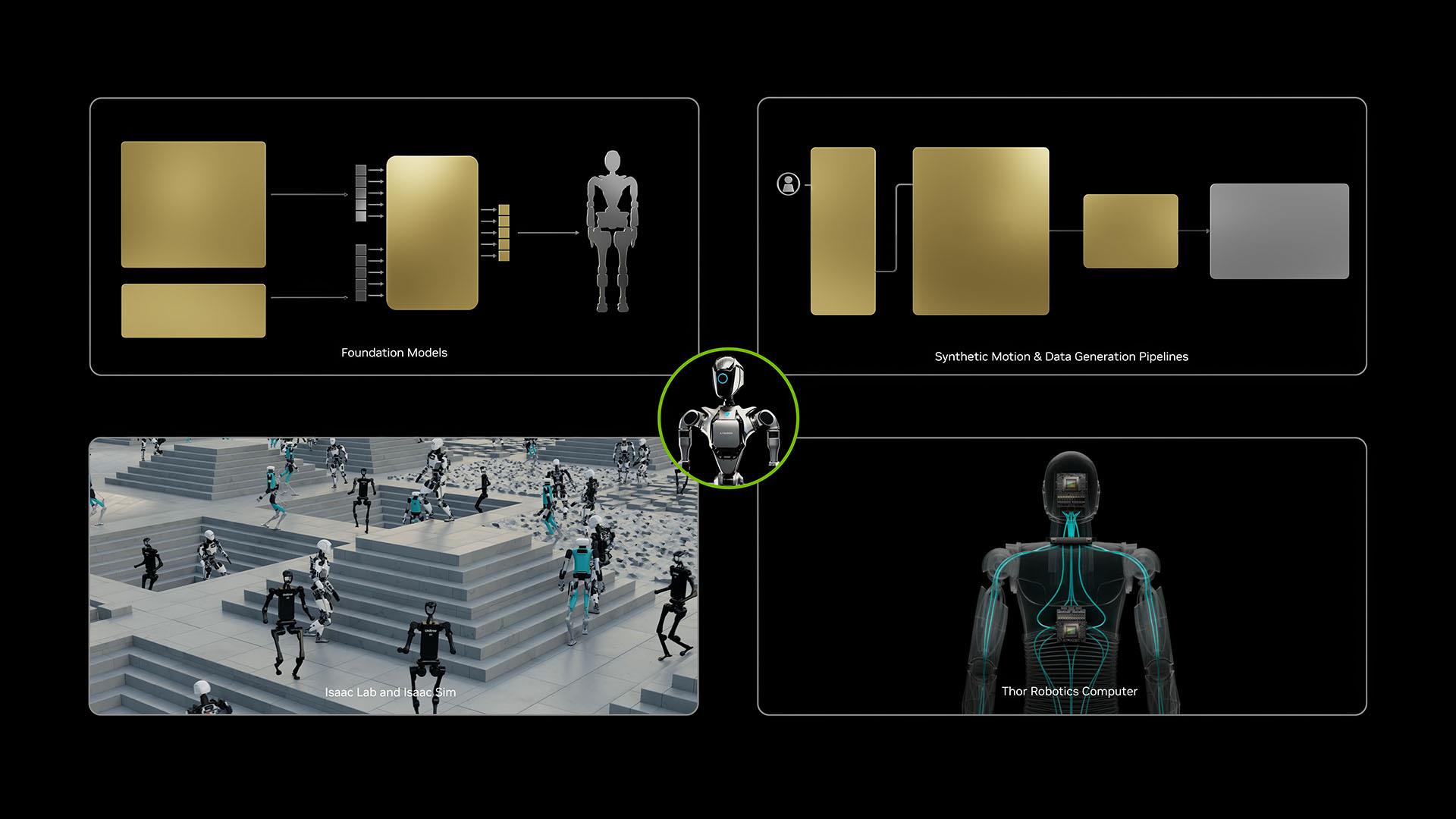
| 모델 | 로봇이 보고 듣고 지시를 이해한 뒤 어떤 행동을 해야 하는지 결정하는 기반입니다. GR00T N 계열은 휴머노이드 조작과 추론을 겨냥합니다. |
|---|---|
| 데이터 파이프라인 | 사람 시연, 합성 궤적, 시뮬레이션 환경, 비디오 데이터 등을 조합해 로봇이 배울 수 있는 형태로 만듭니다. |
| 실행 컴퓨팅 | 훈련은 데이터센터에서, 시뮬레이션은 Omniverse·Isaac 계열에서, 실제 로봇 실행은 Jetson 같은 엣지 컴퓨팅으로 이어지는 구조가 중요합니다. |
2026년 기준으로 주목할 변화
NVIDIA는 2026년 3월 공식 발표에서 Isaac GR00T N1.7, Cosmos 3, Alpamayo 1.5 등 physical AI 관련 모델 확장을 언급했습니다. 이는 로봇 파운데이션 모델 경쟁이 단일 모델 발표에서 데이터·시뮬레이션·배포 생태계 경쟁으로 이동하고 있음을 보여줍니다.
중요한 점은 “로봇에게 ChatGPT를 넣는다”가 아니라는 것입니다. 휴머노이드 로봇은 언어로 지시를 이해해야 하지만, 최종 결과는 연속적인 운동 제어입니다. 컵을 집으라는 명령은 문장 이해로 끝나지 않고, 카메라 인식, 손 위치, 힘 조절, 이동 경로, 실패 복구까지 이어집니다. GR00T 같은 모델이 중요한 이유는 이 흐름을 하나의 학습·개발 체계로 묶으려 하기 때문입니다.
이 발표에서 중요한 점은 GR00T를 단독 모델로만 보지 않는 것입니다. NVIDIA는 GR00T N1.7, Cosmos 3, Alpamayo 1.5 같은 모델군을 함께 언급하며 로봇, 자율주행, 헬스케어 AI가 공통적으로 데이터 생성과 시뮬레이션, 검증 체계를 필요로 한다는 방향을 보여줍니다. 즉 로봇 파운데이션 모델 경쟁은 모델 이름 하나보다 학습 데이터, 합성 데이터, 시뮬레이션, 실제 배포 컴퓨팅을 얼마나 잘 연결하는지로 판단해야 합니다.
실무적으로 어떻게 봐야 할까
한계와 확인할 점
로봇 파운데이션 모델은 가능성이 크지만, 아직 모든 환경에서 사람처럼 일하는 만능 로봇을 의미하지는 않습니다. 공개 데모와 실제 운영은 다릅니다. 특히 안전 인증, 장애물 대응, 예외 상황 복구, 작업 속도, 비용 구조는 현장 배치에서 따로 검증해야 합니다.
따라서 GR00T를 볼 때는 “로봇이 얼마나 똑똑해졌나”만 묻기보다 “데이터를 얼마나 빨리 만들고 검증할 수 있나”, “시뮬레이션과 실제 로봇 사이 차이를 얼마나 줄일 수 있나”, “모델 업데이트가 실제 현장 성능으로 이어지는가”를 봐야 합니다. 이 세 가지가 로봇 파운데이션 모델의 실질적인 경쟁력입니다.
이 글과 이어서 볼 흐름
확인한 공식 출처
이 글은 2026년 5월 20일 기준 공개된 공식 자료를 바탕으로 작성했습니다. 요금, 기능 제공 범위, 베타 여부, 지원 언어와 지역은 계정 유형과 시점에 따라 달라질 수 있으므로 실제 도입 전에는 각 공식 페이지의 최신 안내를 다시 확인해야 합니다.