Humanoid robot guide
휴머노이드 로봇 비교 가이드
Figure, Unitree, Atlas, Apollo, Digit, NEO처럼 서로 다른 휴머노이드 로봇을 제품 스펙, AI 모델, 데이터 수집, 상용화 단계 기준으로 비교해 읽는 허브입니다.
먼저 비교할 로봇
가격·센서·배터리·작업 현장·가정용 가능성처럼 검색자가 실제로 궁금해하는 기준으로 묶었습니다.
 Figure 03 분석: 가정형 휴머노이드가 어려운 진짜 이유가정용 휴머노이드가 어려운 이유와 Figure 03 스펙을 봅니다.
Figure 03 분석: 가정형 휴머노이드가 어려운 진짜 이유가정용 휴머노이드가 어려운 이유와 Figure 03 스펙을 봅니다. Figure Helix 분석: 휴머노이드 VLA가 집과 작업장을 동시에 겨냥하는 이유Helix VLA가 집과 작업장을 동시에 겨냥하는 방식을 봅니다.
Figure Helix 분석: 휴머노이드 VLA가 집과 작업장을 동시에 겨냥하는 이유Helix VLA가 집과 작업장을 동시에 겨냥하는 방식을 봅니다. Unitree R1 분석: 저가형 휴머노이드가 로봇 생태계에 던지는 질문R1 가격과 개발자 생태계 관점에서 의미를 봅니다.
Unitree R1 분석: 저가형 휴머노이드가 로봇 생태계에 던지는 질문R1 가격과 개발자 생태계 관점에서 의미를 봅니다. Unitree G1-D 해설: 로봇 데이터 수집 플랫폼이 중요한 이유G1-D가 데이터 수집 플랫폼인 이유를 봅니다.
Unitree G1-D 해설: 로봇 데이터 수집 플랫폼이 중요한 이유G1-D가 데이터 수집 플랫폼인 이유를 봅니다.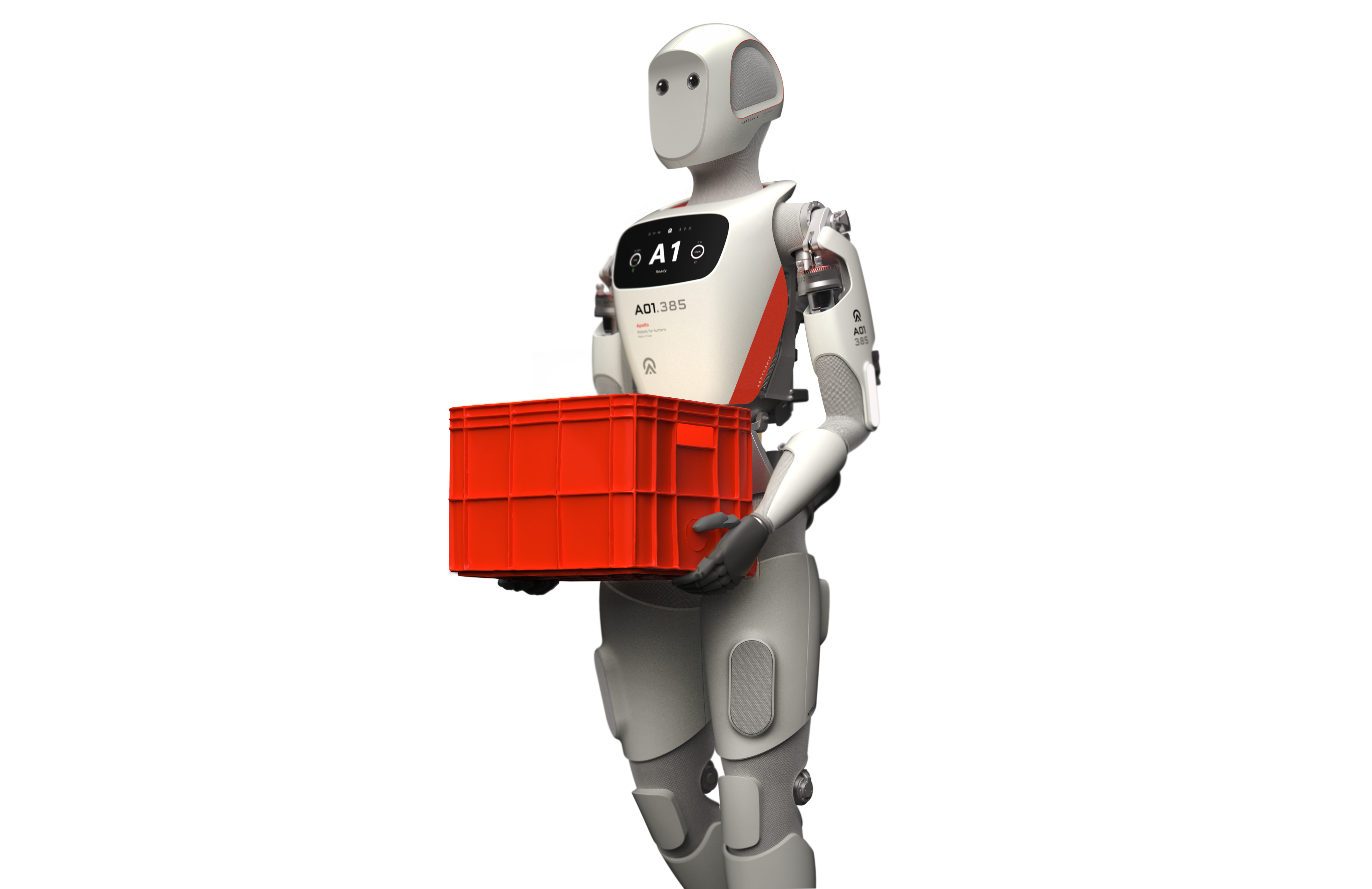 Apptronik Apollo 분석: 안전한 협업형 휴머노이드의 설계 기준Apollo의 payload, runtime, 안전 구역을 봅니다.
Apptronik Apollo 분석: 안전한 협업형 휴머노이드의 설계 기준Apollo의 payload, runtime, 안전 구역을 봅니다. Boston Dynamics Atlas 제품화 분석: 산업용 휴머노이드가 먼저 갈 현장Atlas가 산업 현장에 먼저 들어갈 가능성을 봅니다.
Boston Dynamics Atlas 제품화 분석: 산업용 휴머노이드가 먼저 갈 현장Atlas가 산업 현장에 먼저 들어갈 가능성을 봅니다. Atlas 산업용 전환 해설: 연구 로봇이 제품이 되려면 무엇이 바뀌나연구 로봇이 제품이 되려면 무엇이 바뀌는지 봅니다.
Atlas 산업용 전환 해설: 연구 로봇이 제품이 되려면 무엇이 바뀌나연구 로봇이 제품이 되려면 무엇이 바뀌는지 봅니다. Sanctuary AI Phoenix Gen 8 분석: 휴머노이드 경쟁의 핵심은 데이터 수집이다Phoenix가 데이터 캡처에 집중하는 이유를 봅니다.
Sanctuary AI Phoenix Gen 8 분석: 휴머노이드 경쟁의 핵심은 데이터 수집이다Phoenix가 데이터 캡처에 집중하는 이유를 봅니다. 1X Redwood AI 분석: 가정용 휴머노이드가 집에서 더 어려운 이유NEO와 Redwood AI의 가정용 전략을 봅니다.
1X Redwood AI 분석: 가정용 휴머노이드가 집에서 더 어려운 이유NEO와 Redwood AI의 가정용 전략을 봅니다. Agility Robotics RoboFab 분석: Digit 상용화가 보여주는 로봇 대량생산의 현실RoboFab이 휴머노이드 대량생산의 의미를 바꾸는 지점입니다.
Agility Robotics RoboFab 분석: Digit 상용화가 보여주는 로봇 대량생산의 현실RoboFab이 휴머노이드 대량생산의 의미를 바꾸는 지점입니다.비교 기준
| 검색 의도 | 먼저 볼 글 | 판단 기준 |
|---|---|---|
| 가정용 휴머노이드 | Figure 03, 1X Redwood AI | 프라이버시, 소음, 충전, 실패 설명, 사용자 개입 비용 |
| 산업용 휴머노이드 | Atlas, Apollo, Digit/RoboFab | payload, runtime, 안전 정지, 유지보수, 현장 통합 |
| 개발자·연구용 로봇 | Unitree R1, Unitree G1-D | 가격, DOF, SDK, 원격조작 지연, 데이터 파이프라인 |
| 로봇 데이터 경쟁 | Sanctuary Phoenix, G1-D | 센서 로그, 라벨링, 검수, 학습 연결성 |