확인 기준일: 2026년 5월 17일입니다. 이 글은 NVIDIA GR00T N1.6 휴머노이드 파운데이션 모델를 중심으로 공식 발표와 공식 문서를 대조해 정리했습니다. GR00T N1.6은 휴머노이드용 파운데이션 모델 경쟁에서 모델 구조보다 데이터 혼합이 얼마나 중요한지 보여주는 사례입니다.
NEXT READING
이 글과 이어서 볼 흐름
관련 허브와 다음 글을 함께 보면 선택 기준과 기술 맥락을 더 빠르게 잡을 수 있습니다.
NVIDIA GR00T N1.6 휴머노이드 파운데이션 모델 핵심 요약
- NVIDIA Research는 N1.6을 N1.5보다 개선된 휴머노이드 파운데이션 모델로 소개합니다.
- 공식 자료는 실제 로봇과 시뮬레이션 데이터를 함께 쓰는 방향을 강조합니다.
- 휴머노이드 모델의 병목은 점점 모델이 있느냐보다 어떤 데이터로 사후학습하느냐로 이동하고 있습니다.
공식 자료 기반 세부 해설
GR00T N1.6은 휴머노이드 파운데이션 모델에서 모델 구조, 데이터 혼합, post-training이 어떻게 맞물리는지 보여주는 사례입니다.
- NVIDIA Research는 N1.6을 N1.5의 개선판으로 소개하며, 시뮬레이션과 실제 로봇 실험 모두에서 개선됐다고 설명합니다.
- 기술적으로는 Cosmos-2B VLM 변형, 2배 큰 DiT(32 layers vs 16 layers), post-VLM adapter 제거와 상위 4개 VLM layer unfreeze가 언급됩니다.
- 대부분의 embodiment에서 절대 관절값보다 state-relative action chunk를 예측하도록 바뀌었습니다.
- pretraining은 300K steps, global batch size 16384로 진행됐고, 이후 작업별 post-training은 보통 10K~30K steps와 1K 이하 batch로 수행됐다고 공개됩니다.
| 구분 | 공식 자료에서 확인할 내용 | 읽어야 할 의미 |
|---|---|---|
| 모델 구조 | Cosmos-2B VLM 변형 + 32-layer DiT | 휴머노이드 VLA가 더 큰 행동 생성 모듈과 VLM 결합으로 이동하고 있습니다. |
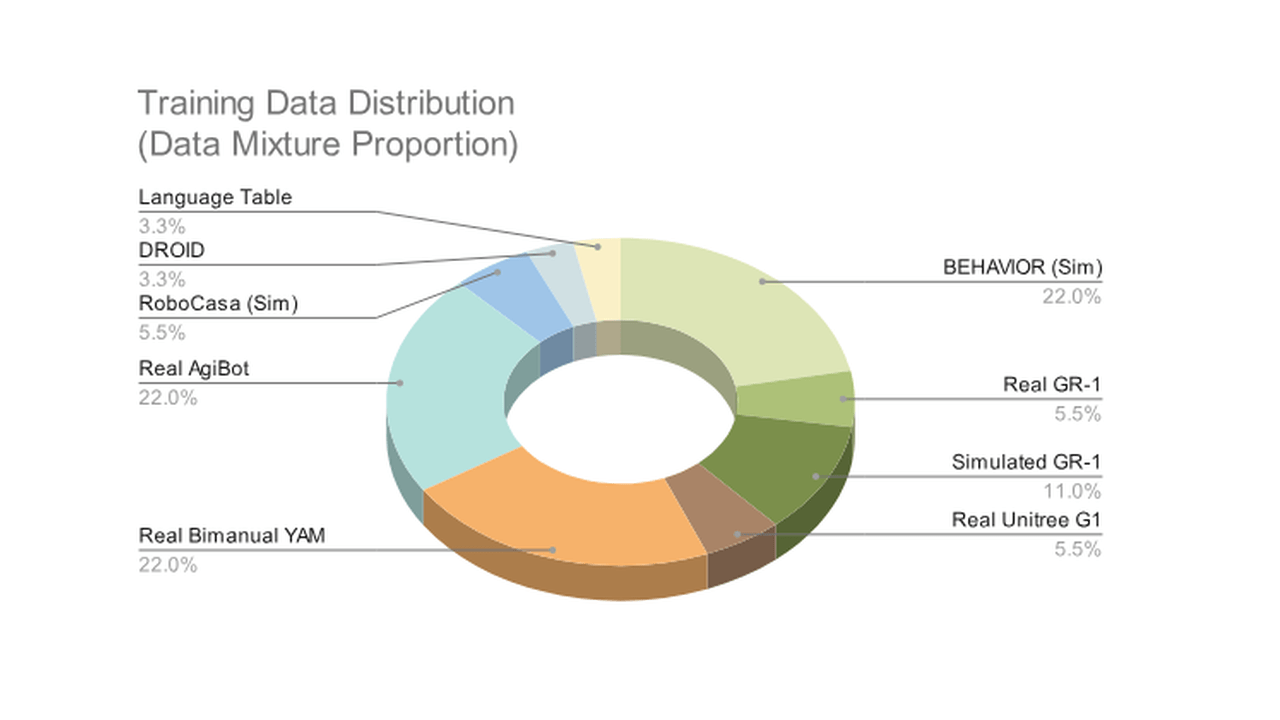
| 데이터 | Bimanual YAM, AGIBot Genie1, Galaxea R1 Pro, Unitree G1 등 | 단일 로봇 데모보다 여러 몸체·작업 데이터를 섞는 능력이 중요합니다. |
| 훈련 전략 | pretraining 후 작은 작업별 데이터로 post-training | 상용 적용은 범용 모델보다 현장별 사후학습 품질에서 갈립니다. |
모델·제품 스펙을 해석하는 방법
GR00T N1.6에서 눈여겨볼 점은 “휴머노이드 전용 거대 모델”이라는 포장보다 상대 행동 공간, DAgger, regularization, RTC 같은 현장 튜닝 요소입니다. 이는 로봇 모델이 단순히 더 커지는 방향만으로는 부족하고, 실제 rollout에서 흔들리는 부분을 데이터 수집과 제어 전략으로 계속 보정해야 한다는 뜻입니다.
참고한 공식 자료와 논문 맥락
- NVIDIA Research – GR00T N1.6 – 구조 변경, 데이터 혼합, pretraining/post-training 조건을 확인했습니다.
왜 지금 중요한가
휴머노이드 로봇은 팔, 손, 몸통, 균형이 동시에 맞아야 합니다. 텍스트 모델처럼 웹 데이터만으로 커지기 어렵고, 실제 동작 데이터와 시뮬레이션 데이터의 비율이 성능을 좌우합니다.
기술적으로 봐야 할 지점
GR00T N1.6 자료에서 주목할 부분은 단일 벤치마크 점수가 아니라 여러 형태의 로봇과 작업 데이터를 섞는 방식입니다. 모델 아키텍처 개선도 중요하지만, 데이터 분포가 바뀌면 모델이 잘하는 작업의 경계도 함께 바뀝니다.
| 볼 지점 | 해석 기준 |
|---|---|
| 모델 | 단일 데모보다 여러 환경에서 같은 판단을 유지하는지 봅니다. |
| 데이터 | 실제 데이터, 시뮬레이션 데이터, 원격조작 데이터가 어떻게 섞였는지 확인합니다. |
| 제품성 | 성능 수치와 함께 배포, 유지보수, 안전 정지, 실패 복구 기준을 봅니다. |
실무 해석
피지컬 AI의 해자는 모델 파일이 아니라 데이터 운영입니다. 누가 더 많은 로봇을 오래 굴리고, 실패 장면을 어떻게 분류하고, 다음 학습에 넣는지가 장기 경쟁력입니다.
도입 전 체크포인트
- 데이터가 실제 로봇·시뮬레이션·원격조작 중 어디에서 왔는지 확인합니다.
- 벤치마크가 특정 로봇 몸체에만 맞춰져 있는지 봅니다.
- 모델 공개와 함께 평가 코드·모델 카드가 제공되는지 확인합니다.